
Methodology Summary
As the rapid developments of emerging technologies (e.g., smart vehicles, shared mobility, sensing, communication) in transportation engineering, unpresented research opportunities have risen at an increasingly rapid pace, ranging from element mechanism and behavior (e.g., infrastructure sensing, smart vehicle control, individual traveler behavior) to systems modeling and management (e.g., interdependence of infrastructure systems, resilient systems design, and associated equity and public health issues). Grasping these opportunities becomes increasingly crucial to the leadership of the Civil & Environmental Engineering (CEE) department and even the engineering college at a top university. Our research focuses on the fore-frontier multi-scale problems of smart mobility by integrating general fundamental theories and methodologies with cutting-edge interdisciplinary technology developments. Our research approaches integrate computer modeling and simulation with real-world field tests and demonstrations, which bridges upstream knowledge generation and downstream technology transfer.
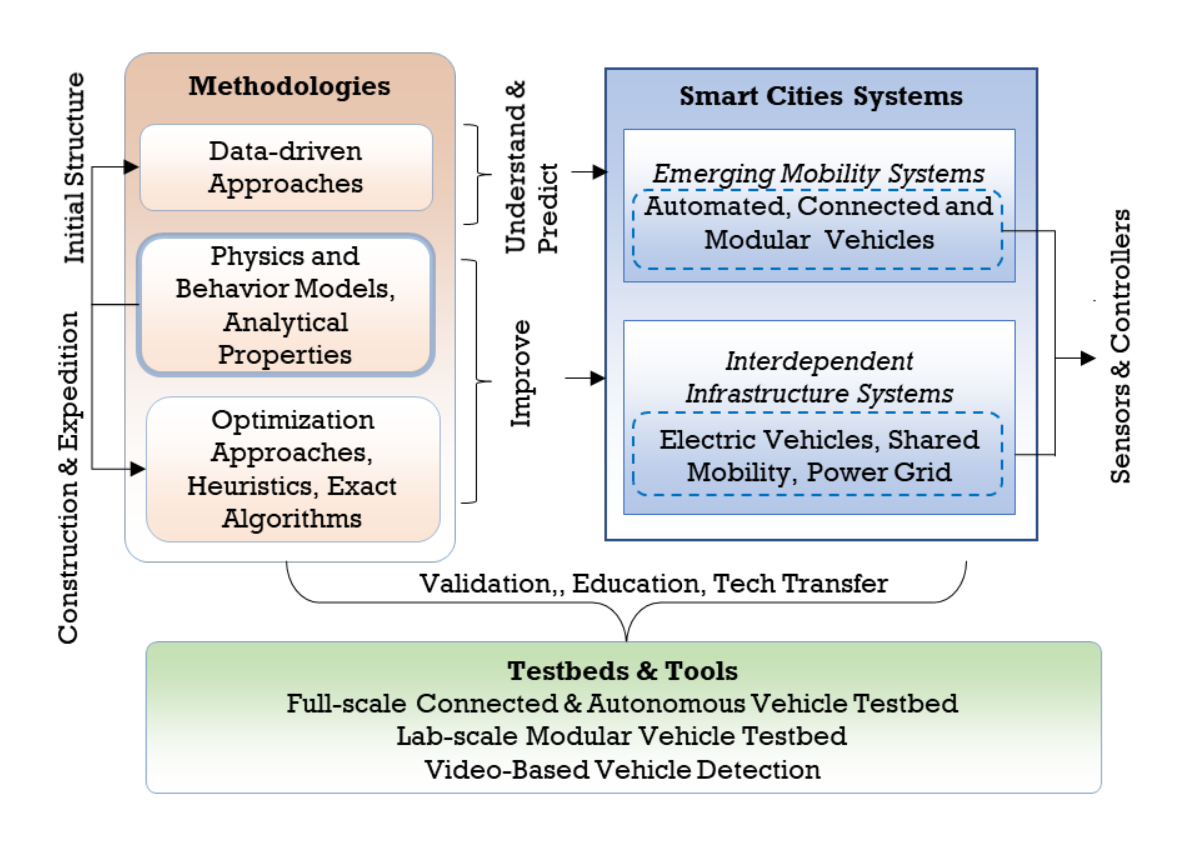
Our research paradigm is illustrated in the figure on the right. It aims to establish a set of methodologies to understand, predict and eventually improve smart city systems via sensors, controllers and design variables rendered by emerging technologies (e.g., connected, automated, modular, shared and electric vehicles). It is centered at proposing fundamental models and discovering analytical properties for understanding first-order physics and behaviors of the investigated systems at different scales. Data-driven approaches will be leveraged to expand the parsimonious structures of fundamental models to capture latent system dynamics for better predictions. With good understanding and predictions, a set of optimization approaches are proposed for optimizing systems design. The discovered analytical properties will be used to construct (e.g., by revising special analytical solutions to near-optimum ones) and expedite (e.g., by reducing the solution space with theoretical bounds) the solution approaches. Last but not the least, to ensure that these theoretical and modeling developments have tangible impacts to stakeholders and the general public, we have built a set of real-world testbeds and software tools.
Emerging Mobility Systems
The first system application context of our research is emerging mobility systems using connected and automated vehicles (CAV) and modular vehicles (M; i.e., vehicle units able to autonomously dock into vehicles of different sizes en-route) as system sensors and controllers (or design variables). Following the above research paradigm, we are address these opportunities in the following aspect:
Models and analytics: Our group for the first time unified microscopic CAV control with classic car following behaviors via analyzing feasibility (Zhou et al. 2017; Li and Li, 2019a, b) and stability (Li et al., 2014, Wang et al., 2019), transforming inter-disciplinary theories (e.g., second-order time-geography theory, Markov-chains) and considering new factors (e.g., nonlinearity, heterogeneity and stochasticity). Further, we extended classic the traffic fundamental diagram to mixed traffic capacity analysis considering stochastic and heterogenous traffic (Ghiasi et al, 2017).
Data-driven approaches: To complement the predictability of these analytical models, we utilize machine leaning methods to predicting future vehicle trajectories in both regular and mixed traffic environment. Methods ranging from simple Q-table (Li & Wang, 2019) to sophisticated deep learning (Zhou et al., 2017b; Wang and Li, 2018) are tested. We also explore to enhance data-driven methods with analytical structures (e.g., using car-following models to construct neural network components).
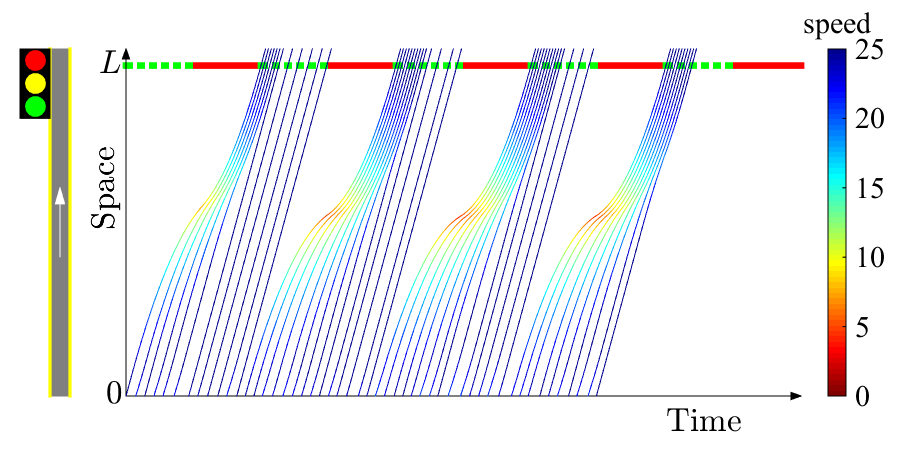
Optimization approaches: The analytical results inspired construction of fast heuristic algorithms (Ma et al., 2017a; Ghiasi et al., 2019a; Yao et al., 2018; Li and Li, 2019b; as illustrated in the figure on the right ) and development of expedited exact solution algorithms (Li et al, 2018; Li & Li, 2019a; Xu et al., 2019). Our comparison results show that the constructed heuristic algorithms can solve near-optimum CAV/MV trajectories (e.g., within a small optimality gap from the exact optimal solution counterparts) in sub-second solution time, which suffices real-time applications for CAV/MV vehicle trajectory planning and control. On the other hand, the macroscopic properties are informative for future infrastructure planning in accommodating mixed traffic without inducing excessive congestion. For example, they can be used to determine the optimal CAV managed lanes (Ghiasi et al, 2019b) and future infrastructure expansion planning.
Impacts: To validate the above work, our group has built a CAV testbed with full-scale connected and autonomous vehicles retrofitted from passenger cars. The partnerships with state and local stakeholders (e.g., Florida Suntrax, Busch Gardens, I-Street, and USF Campus) have much expanded the capacity of the CAV testbed to various testing scenarios while making direct impacts on relevant stakeholders and policy makers (e.g., demonstrations to USDOT Deputy Assistant Secretary and Program Managers, FDOT Secretary, and several Congressmen and Congresswomen). The research results have been implemented in the FHWA CAV fleet control (e.g., speed harmonization) and in FDOT District 1 Regional Planning model (also incorporated in their white paper). The research outcomes and facilities have led to collaborations with Connected Wise LLC (integrating their connected vehicle products into our CAV tested) and with Utah DOT (for possible demonstrations of these developments on their connected corridor). New trajectory data from both public roads and testbeds have been collected with the testbeds and tools we developed, including the first-of-their-kind mixed CAV traffic data. Particularly, our patented deep-learning-based drone/helicopter video trajectory extraction tool has helped FHWA process video trajectory data from tens of sites across the nation, including a 2-hr dataset covering the complete life cycle of a bottle neck on a 2-mile freeway segment.
Future research: We will continue to expand physics and behavior models by considering evolving technologies and more general infrastructure topologies. The trajectory control and capacity design models will be expanded from longitudinal control to 2-D control, from wirelessly connected vehicles to physically connected vehicles (e.g., MV technology), and from a segment to a corridor and to an entire network. Relevant cyber-security issues will be also address via trajectory control and authentication. The trajectory control performance will be demonstrated with both our full-sized testbed and small-scale lab testbeds. It is also interesting to integrating real-time infrastructure and traffic sensors (e.g., structural health, road friction sensors, in-vehicle safety sensors, road side traffic sensors, visibility and environmental sensors, etc.) to traffic management and CAV control, which will yield not only far-reaching impacts but also imminent benefits (e.g., Florida DOT is in particular interested in integrating vehicle based sensors with their pilot connected vehicle systems to improve traffic operations).
Resilient & Interdependent Infrastructure Systems
Another system application context is resilient & interdependent infrastructure systems design. Our research aims to optimize transportation network design and operations via emerging vehicle technologies, considering connections and interdependences with other infrastructure systems (e.g., electric vehicles and shared mobility coupling power grids and transportation systems).
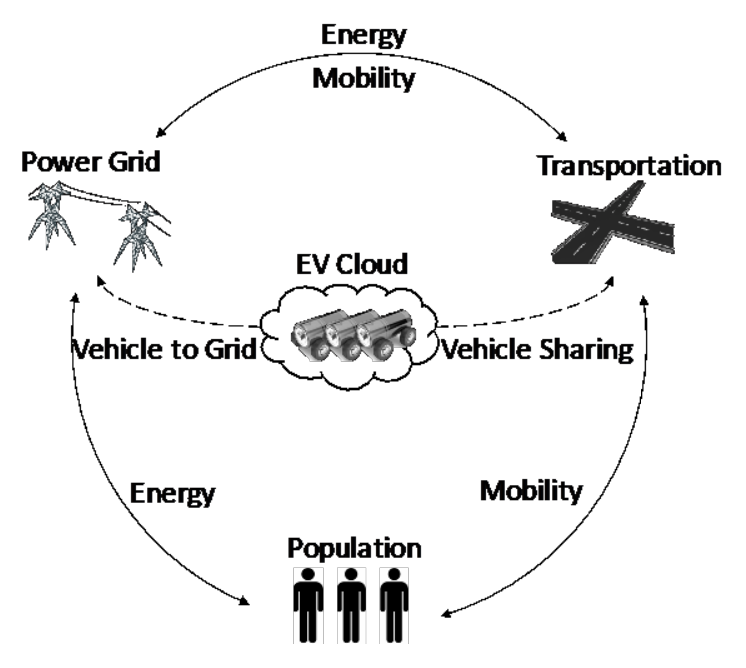
Models and analytics: To look through complex network systems problems into fundamental system behaviors, we first investigate a basic system component, e.g., a local neighborhood (Chen and Li, 2019) or a basic flow circulation (Fan et al., 2018), which often yields elegant theoretical properties (e.g., sustainable circulation patterns across interdependent infrastructure systems) on optimal or near-optimum solution patterns. This component-based analysis approach has been applied to MV dispatch (Chen and Li, 2019; Chen et al., 2019a; see the figure on the right for illustration of a MV system), shared electric vehicles (Li et al., 2016), logistics system design (Yun et al., 2019b), sensor networks (Li and Ouyang, 2012) and interdependent infrastructure systems (Fan et al., 2018). Yet successful application of the local-neighborhood-based idea, or continuum approximation (CA), relies on a "local impact" property of the system behavior, i.e., local decisions having negligible impacts on remote areas. Our recent work focuses on transforming a problem that originally does not possess the local impact property into one with this property suitable for CA (Chen et al., 2019a).
Data-driven approaches: To complement such parsimonious understanding of system infrastructures in a data-rich environment, we have tested data-driven approach to describe travel demand, including statistics (Lin et al., 2019) and deep-learning methods (Zhao & Li, 2018). Emerging data sets such as geo-tagged twitter data have been used to construct travel demand (Parsafard and Li, 2019).
Optimization approaches: Such understanding and predictions will eventually serve the optimal design of interdependent network systems. The CA analytical results have been customized to populate near-optimum solutions in the above studies with proper heuristic discretization approaches. Especially, inspired by the physical process of growing a crystal from a core, we propose a linear-time heuristic algorithm for discretizing a 2-D continuous CA solution into near-optimal discrete solution ready for implementation (Fan et al, 2019). Further, relevant theoretical properties have been used to accelerate exact solution approaches with mathematical programming via providing initial solutions and theoretical bounds (Chen et al., 2019b; Yun et al., 2019b). Such a research paradigm yields a series of mathematical-programming-based approaches in designing various systems, such as shared mobility (Ma et al., 2017b), electric vehicles (Hua et al., 2019; Zhao et al., 2018), logistics system design (Li, 2013) and interdependent systems (Fan et al., 2018; Zhao et al., 2019).
Impacts: The optimization models have been used to provide solutions to local transit agencies (e.g., Pinellas Suncoast Transit Authority (PSTA)) on route planning, fleet management and electrical vehicle power supply. One study in using MVs as an alternative to PSTA's existing routes has made through the final competition of the Transportation Technology Tournament hosted by the USDOT Volpe Center. We are also helping the Florida Department of Agriculture & Consumer Services Office of Energy conduct network analysis of Florida's fuel and charging stations. We will develop web-based tools to guide drivers to the best stations particularly under disastrous scenarios (e.g., hurricanes).
Future research: In the future, this research paradigm will be used to address problems where emerging vehicle technologies (e.g., CAV, MVs, shared mobility) have enhanced system connections and interdependence. Besides technical aspects, social issues such as equity and ethics will be also incorporated in system design. For example, our identified equity measures for emerging technology access (Chen et al., 2019c) can be integrated into the system design framework.