
Vision and Background
Real-world vehicle trajectories have significant efforts on studying various traffic phenomena, such as car following and lane-changing behaviors, traffic oscillation propagation, and traffic capacity drops (Shi and Li, 2020), etc., and thus enormous efforts have been made to collect real-world vehicle trajectory datasets.
(1) Shooting high-resolution aerial videos using drones or helicopters.
(2) Detecting vehicles from aerial videos with intelligent CNNs.
(3) Positioning vehicle locations with SLAM techniques
Objective and Progress
(1) We developed an advanced real-world trajectory extraction tool, the Video-Based Intelligent Road Traffic Universal Analysis Tool (VIRTUAL), to extract vehicle trajectories from aerial videos. The method includes three steps: a. vehicle identification and tracking, b. camera rotation and shifting correction, and c. semi-automatic lane identification.
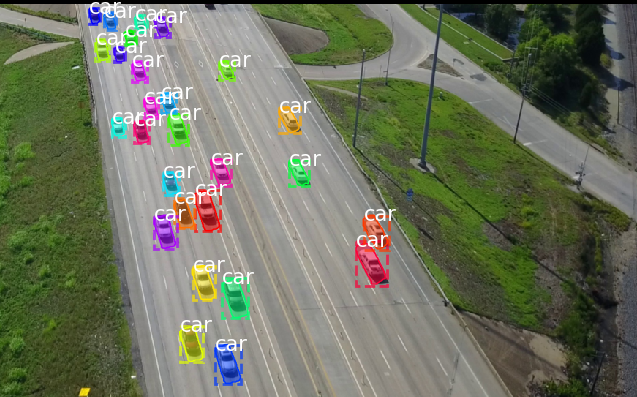
a. To identify and track vehicles in each frame efficiently and correctly, we propose to locally train the Mask R-CNN model and apply the model to detect vehicles in each frame of the aerial videos.
b. 3D construction: Generally, we calculate the relative coordinate in pixels for each detected vehicle to a reference point whose real-world coordinate is known. By conducting 3D reconstruction to each frame, we are able to obtain the real-world coordinate of each vehicle and acquire the trajectories subsequently.
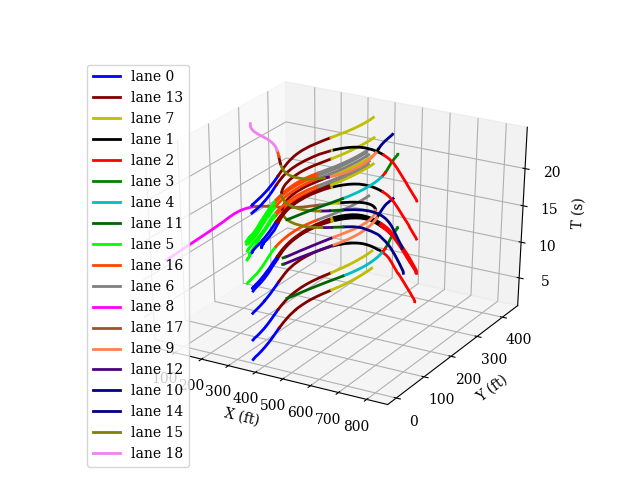
c. The basic idea of the lane identification algorithm is to cluster segments of trajectories within small distance apart into a new lane. Besides, a Monte Carlo based lane marker detection method that detect lane markers accurately and efficiently. Combined with the video calibration method and lane markers detected, positions of vehicles are calculated accurately.
(2) With the VIRTUAL, we extracted a 2-hour, 8000 ft vehicle trajectory data from aerial video on I-75, which is called High-SIM.
a. The datasets are extracted trajectories from helicopter videos from 16:15 – 18:15 on Tuesday (May 14, 2019). It covers a 8000ft segment includes a downstream ramp.
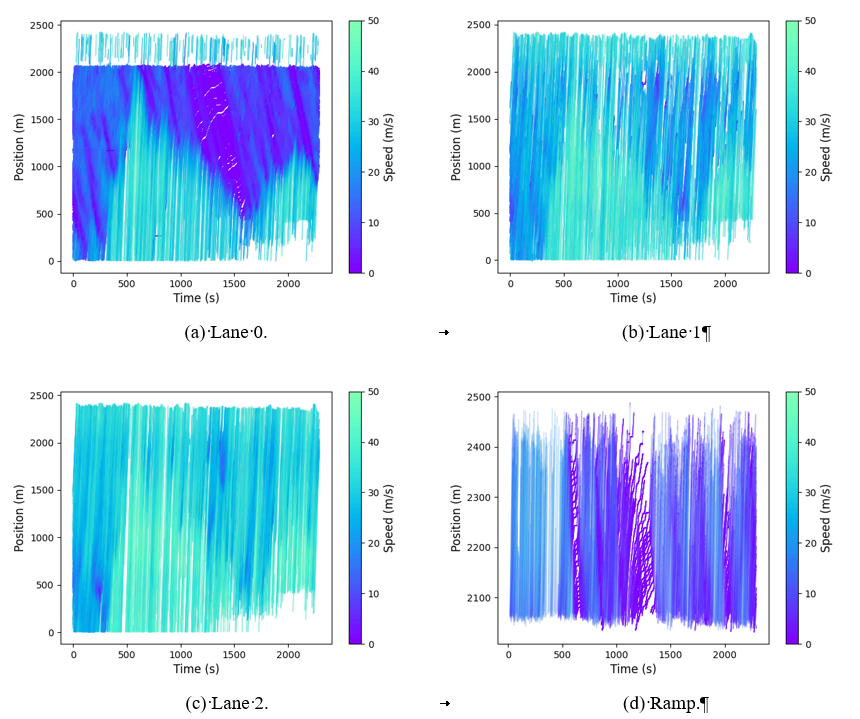
(3) We analyzed the quality of the HIGH-Sim data. The results show that the HIGH-Sim data is better than NGSIM data in aspects of length, accuracy, and platoon consistency, as shown in Table 1.
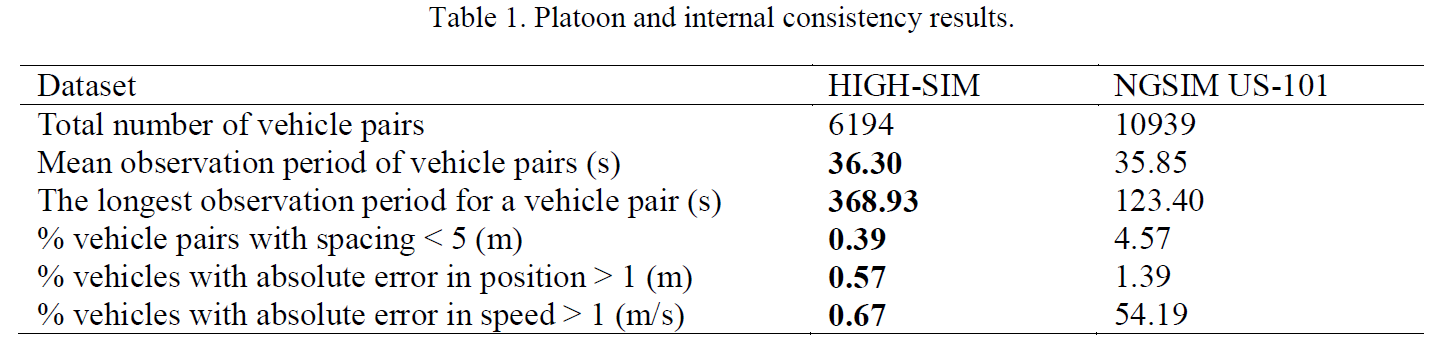
a. As shown in Table 1, regarding the spacing less than 5 m (unphysical inter-vehicle spacing), the position error greater than 1 m, and the speed error greater than 1 m/s, there are less records in the HIGH-SIM dataset than in the NGSIM US-101 dataset, which indicate higher platoon consistency of HIGH-Sim data over NGSIM.
(4) We proposed a novel trajectory connection method based on car following model to connect broken trajectory data.
Related Projects
Trajectory Investigation for Enhanced Microsimulation Calibration Guidance (FHWA HRDO20180024PR STOL II Task Order 18-252).