
Trajectory Planning and Control
Highway traffic congestion and stop-and-go movements are almost inevitable experiences in highway traffic due to intrinsic limitations in human driving behavior and information access. These phenomena are linked to a number of adverse impacts from highway traffic, including excessive fuel consumption, extra safety hazards, and increased travel delay. Among a number of potential solutions to stop-and-go traffic (e.g., variable speed limits, ramp metering, merging traffic control, and signal coordination), the connected automated vehicle (CAV) technologies have received increasing attention recently. CAV technologies can offer the possibilities of controlling vehicle trajectories and modifying driving behavior. Therefore, with a proper control algorithm, we may be able to significantly dampen traffic oscillations and reduce stop-and-go traffic. Most of the existing studies focusing on improving traffic smoothness using CAV technologies are essentially centered on a vehicle trajectory optimization problem. Despite the efforts taken in this area, most existing trajectory optimization models either require quite some computational resources and sophistication in algorithm design or rely on a numerical algorithm that does not ensure solution optimality and may need many iterations to converge. Our lab has been investigating and developing a series of simplified trajectory optimization models and algorithms to address the existing challenges found in the literature.
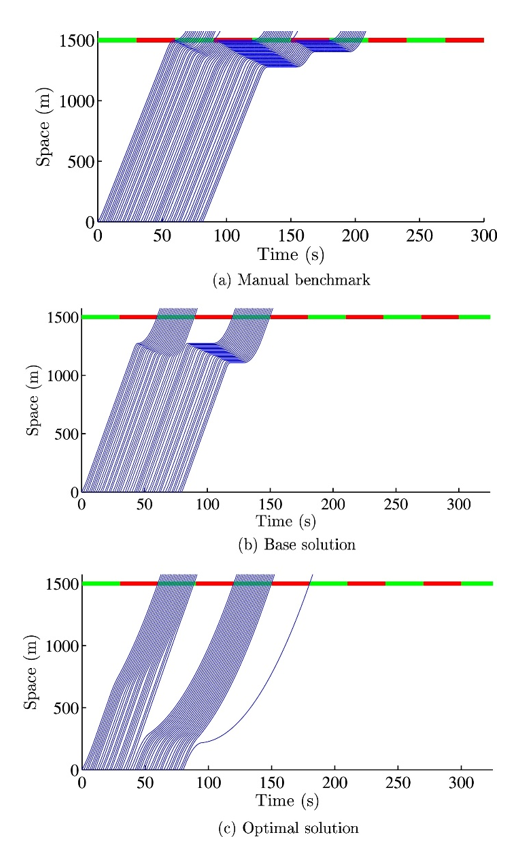
Parsimonious shooting heuristic: As part of a research project supported by the National Science Foundation (NSF) research plan, we proposed a parsimonious shooting heuristic (SH) algorithm to construct vehicle trajectories on a signalized highway segment that comply with boundary conditions for vehicle arrivals, vehicle mechanical limits, traffic lights and vehicle following safety (Zhou et al., 2017). This algorithm breaks each vehicle trajectory into a few sections that are analytically solvable. This decomposes the originally hard trajectory design problem to a simple constructive heuristic. Then we slightly adapted this shooting heuristic algorithm to efficiently solve a leading vehicle problem on an uninterrupted freeway. To study theoretical properties of the proposed algorithms, the time geography theory is generalized by considering finite accelerations. With this generalized theory, it is found that under mild conditions, these algorithms can always obtain a feasible solution to the original complex trajectory design problem. Further, we discovered that the shooting heuristic solution is a generalization of the solution to the classic kinematic wave theory by incorporating finite accelerations. We identified the theoretical bounds to the difference between the shooting heuristic solution and the kinematic wave solution. Numerical experiments are conducted to verify the theoretical results and to draw additional managerial insights into the potential of trajectory design in improving traffic performance. Building upon this foundation, we proposed a holistic optimization framework for identifying a stream of vehicle trajectories that yield the optimum traffic performance measures on mobility, environment and safety (Ma et al., 2017). The computational complexity and mobility optimality of SH is theoretically analyzed, and verifies superior computational performance and high solution quality of SH. A numerical sub-gradient-based algorithm with SH as a subroutine (NG-SH) is proposed to simultaneously optimize travel time, a surrogate safety measure, and fuel consumption for a stream of vehicles on a signalized highway section. Numerical examples are conducted to illustrate computational and theoretical findings. They show that vehicle trajectories generated from NG-SH significantly outperform the benchmark case with all human drivers at all measures for all experimental scenarios. These studies reveal a great potential of transformative trajectory optimization approaches in transportation engineering applications. It lays a solid foundation for developing holistic cooperative control strategies on a general transportation network with emerging technologies.
Piecewise trajectory optimization: Following the above studies, we have investigated a further simplified piecewise trajectory optimization model for the full CAV environment (i.e., 100% CAV penetration rate) to address the existing challenges found in the literature (Li et al., 2018). This simplified model confines each trajectory to consist of no more than five quadratic sections. Further, this simplified model assumes that all vehicles arrive at the same speed. This is a reasonable assumption for cases when the upstream traffic is well controlled in a similar manner. While the new model preserves the main features of the shooting heuristic (e.g., yielding overall smooth trajectories) only with these minor simplifications, it has a number of appealing theoretical and algorithmic properties that were not found in the existing trajectory optimization problems. We discovered elegant theoretical relationships between a general objective function and its associated variables and constraints. These findings enabled development of an analytical solution algorithm that efficiently solves the exact solution to this simplified problem. This analytical exact algorithm makes a significant methodological contribution to the CAV trajectory optimization literature that has mostly relied on numerical and heuristic algorithms in the past. Numerical studies are conducted to verify the solution efficiency and quality compared with the existing approach and illustrate applications of the proposed model to signalized highways and non-stop intersections. Further, to examine the intuitive conjecture that traffic smoothing leads to longer queue propagation, we investigate a homogeneous yet representative case and find analytical conditions for this conjecture to fail. Interestingly, we find that trajectory smoothing may not always cause longer queue propagation but instead may mitigate queue propagation with appropriate settings.
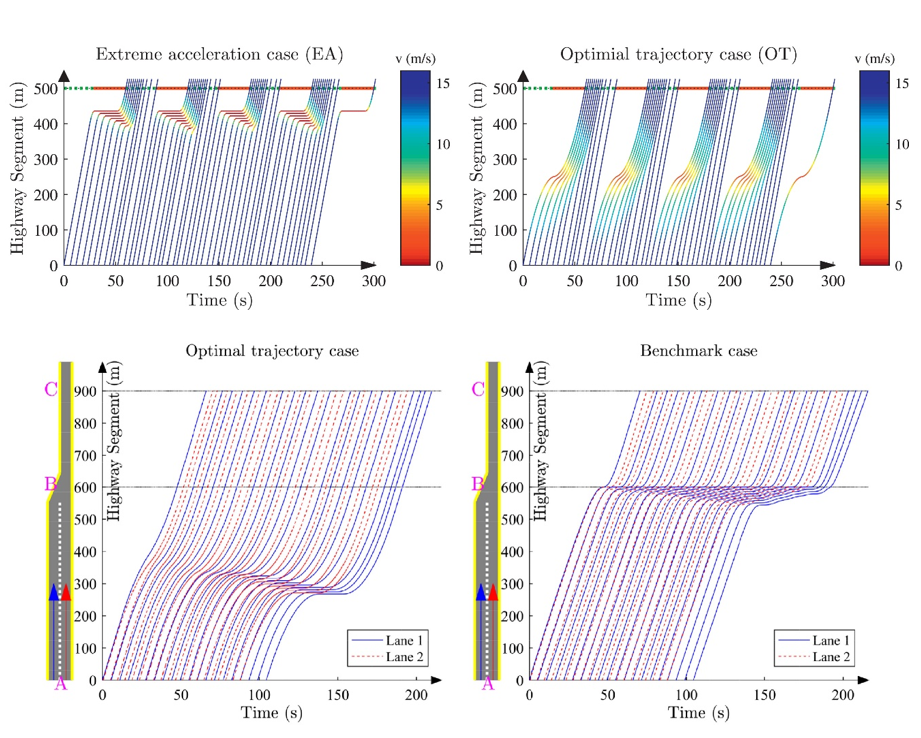
Speed harmonization: To extend the proposed trajectory optimization concept to a mixed traffic environment, our lab proposed a speed harmonization algorithm that addresses mixed traffic freeways with various CV and CAV market penetration rates (Ghiasi et al., 2019). Traditionally, variable speed limit (VSL) and speed advisory message approaches are used to minimize traffic speed variations. Most of the existing studies can only advise or enforce human drivers to adjust their speed. However, the unpredictable nature of human behaviors may compromise or even fail these approaches. Moreover, most of these studies rely on limited fixed traffic sensors (e.g., loop detector, Remote Traffic Microwave Sensor (RTMS), etc.) deployed on highways. The data received from most of these sensors are low in resolution and related to certain sets of fixed locations. As a result, the data captured from the fixed deployed traffic sensors may not provide effective resources for advanced speed harmonization techniques. Therefore, it might be impossible to significantly smooth traffic speeds using the traditional speed harmonization control strategies. Contrary to most speed harmonization models, our proposed algorithm uses real-time traffic sensor data as well as the real-time information provided by CVs and CAVs for adjusting and correcting the CAV controls. These two sets of information are integrated and used by our innovative prediction algorithm to estimate the traffic downstream to each CAV. The prediction outcomes then enabled the algorithm to plan the future CAV trajectories as smooth as possible to improve performance of a freeway traffic stream. To quantify the benefits, four most important measures of effectiveness in traffic flow analyses are considered: throughput, traffic speed variations, fuel consumption and emission, and surrogate safety measures. Numerical experiments are performed to evaluate the performance of the algorithm and to test the algorithm with various parameter values. The results show that the proposed speed harmonization model can produce much smoother trajectories for CAVs and their following vehicles than the benchmark case, and thus improves the overall smoothness of the traffic stream in different traffic conditions. Overall, this speed harmonization algorithm can provide a methodological bridge to more advanced control strategies in future CAV mixed traffic.
Vehicle Coordination
With the rapid advances in emerging CAV technologies, the problem of vehicle cooperation and coordination has been receiving increasing attention. CAVs are equipped with necessary communication and automation technologies that allow them to coordinate with each other and with infrastructure to maximize safety and network efficiency. Facilities at a given transportation network also can be equipped with traffic sensors and communication networks (i.e., dedicated short-range communication [DSRC] systems) to help support CAV coordination. Such a connected ecosystem, combined with the current level of vehicle automation, provides an incremental opportunity for traffic flow improvements at a given transportation network that may produce widespread mobility, safety, and environmental benefits. For instance, with communication facilities, vehicles can be aware of downstream traffic conditions at a given conflict area (e.g., signalized/unsignalized intersections, merging roadways, work-zones, etc.) and approximately determine the time that they can enter the conflict area. This way, vehicle speeds can be smoothed/optimized such that the stop-and-go traffic patterns and backward shockwave propagations are reduced/eliminated. Also, with these emerging technologies, the passing sequence of vehicles at a conflict area can be further improved with proper coordination to increase traffic throughput. Our lab has been investigating the macroscopic and microscopic theoretical properties of the vehicle coordination problem at a general conflict area, proposing analytical models, and developing efficient optimization algorithms that are computationally suitable for real-world applications.
Macroscopic control: Initially, we proposed an analytical model to the joint vehicle multi-trajectory and signal optimization problem in the macroscopic level for two conflicting traffic approaches with an objective of simultaneously minimizing travel delay and fuel consumption (Soleimaniamiri et al., 2020). This analytical model can be solved to the exact optimum solution efficiently, is easy to scale up, and have a parsimonious model structure. This study not only provides managerial insights into the future pure-automated traffic environment, but also paves the way to the near-future mixed traffic scenario (e.g., with some adaptations to the proposed control strategy). This study modifies the original complex formulation in two ways. First, the vehicle trajectory shape is simplified into a piece-wise quadratic function with no more than five segments. Second, instead of using the highly non-linear instantaneous fuel consumption function, a simplified macroscopic measure is proposed to approximate fuel consumption as an analytical quadratic function of signal red interval. These simplifications provide elegant theoretical properties that enable solving an analytical exact solution to this complex problem with parsimonious analytical in-sights. Numerical examples revealed that the proposed model can significantly reduce travel delay and fuel consumption. Moreover, we conducted a set of numberical experiments to show that the presented algorithm is highly efficient and appropriate for real-world traffic applications.
Microscopic control: From the microscopic point of view, we proposed an optimization model to solve the exact optimal solution to the vehicle scheduling optimization problem at a general conflict area (i.e., the problem of allocating time to vehicles to pass the conflict area in a system-level fair manner) with the objective of minimizing total travel delay (Soleimaniamiri and Li., 2019). While most studies in this area are intended for a simple conflict area with two approaches (e.g., a one-way intersection) with identical vehicles, our proposed optimization model can handle any general conflict area and considers heterogeneous vehicle settings and value of times. We analysed the theoretical properties of the vehicle scheduling optimization problem and proposed a branch-and-bound algorithm featured with a novel set of valid cuts that dramatically reduce the solution space and make the proposed algorithm suitable for real-world applications. Numerical experiments are performed to evaluate the proposed control strategy and the algorithm performance, and to illustrate the application of this algorithm at a general conflict area. The experimental results show that the introduced set of valid cuts to the proposed branch-and-bound algorithm can significantly reduce the solution space of the vehicle scheduling optimization problem and consequently, much reduce the computational time of the proposed branch-and-bound algorithm. The comparison results also show that the coordination of vehicles with the proposed optimization model can significantly increase the capacity of the conflict area and reduce the vehicle travel time delay compared to existing well-known control strategies (e.g., stop signs and signals) while it is computationally tractable for real-world CAV applications. Currently, our lab aims to extend this research by proposing a machine learning technique to predict the optimal solution to the vehicle scheduling optimization problem in a much more efficient and scalable manner.
Applications and Simulations
Our research team has been working on multiple projects with FHWA on the CARMA eco-system development over the past few years. We helped FHWA develop freeway speed harmonization algorithms in CAMRA 2. Recently, we have been helping FHWA develop AMS simulation models for CAVs compatible with CARMA considering different cooperative behaviors:
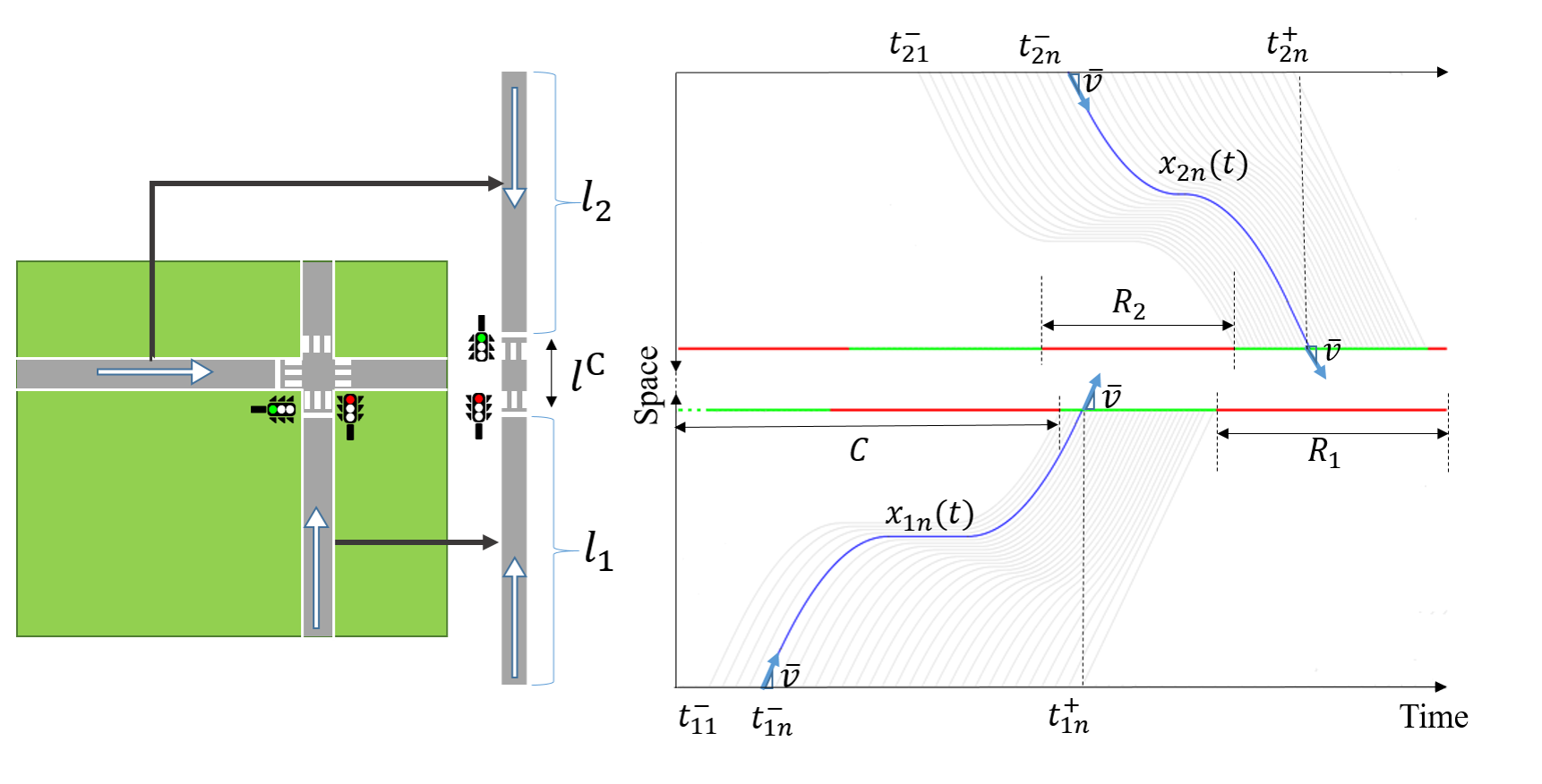
Edge-computing-based cooperative control frameworks for arterials: In this project, we are developing the first set of CARMA use cases algorithms and support the relevant field experiments on TSMO applications at different forms of intersections. This project focuses on safely and efficiently controlling CARMA-equipped vehicles at arterials and has four main use cases, each of which focuses on a given specific scenario, i.e.,
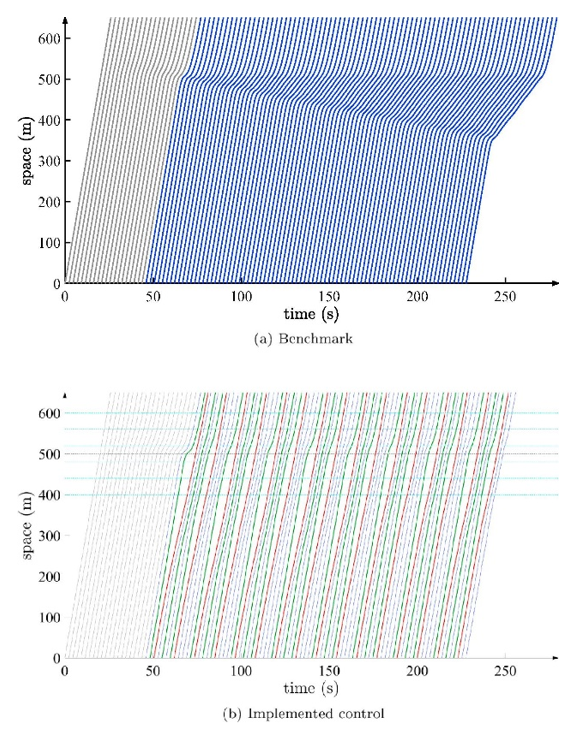
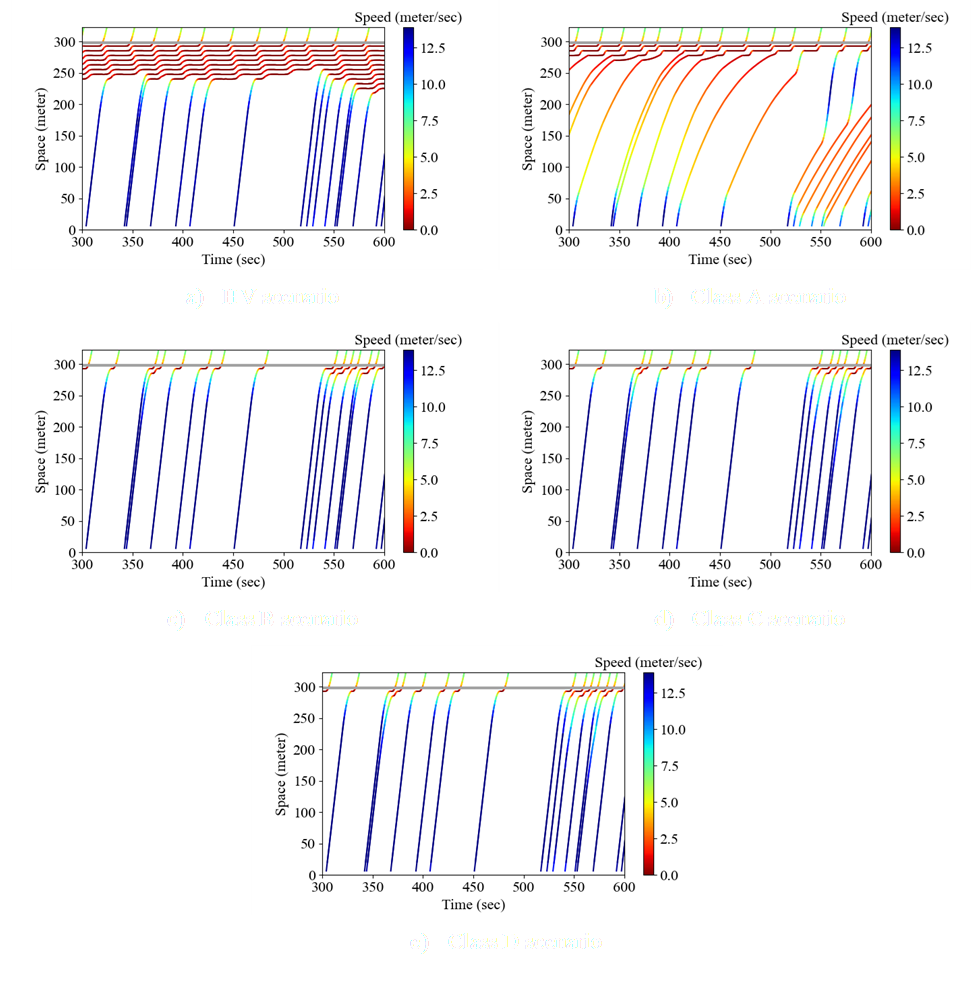
In this project, we proposed a set of fundamental edge-computing-based cooperative control frameworks that distributes the computational burden among different entities (e.g., central controller, CARMA-vehicles) and significantly reduces operational complexity and associated risks and liabilities for traffic operators, which makes it much more suitable for real-time applications. Further, this project for the first time investigates the impact of different cooperation classes recently defined in the SAE J3216 standard on the overall traffic performance. The trajectory plots shown in the figure and the simulation results show that the proposed cooperative control frameworks not only improve the system-level traffic performance (e.g., decrease overall travel delay, increase throughput at the intersection box), but also reduce the stop-and-go traffic patterns and backward shockwave propagations, which ultimately improves energy efficiency and travel experiences.
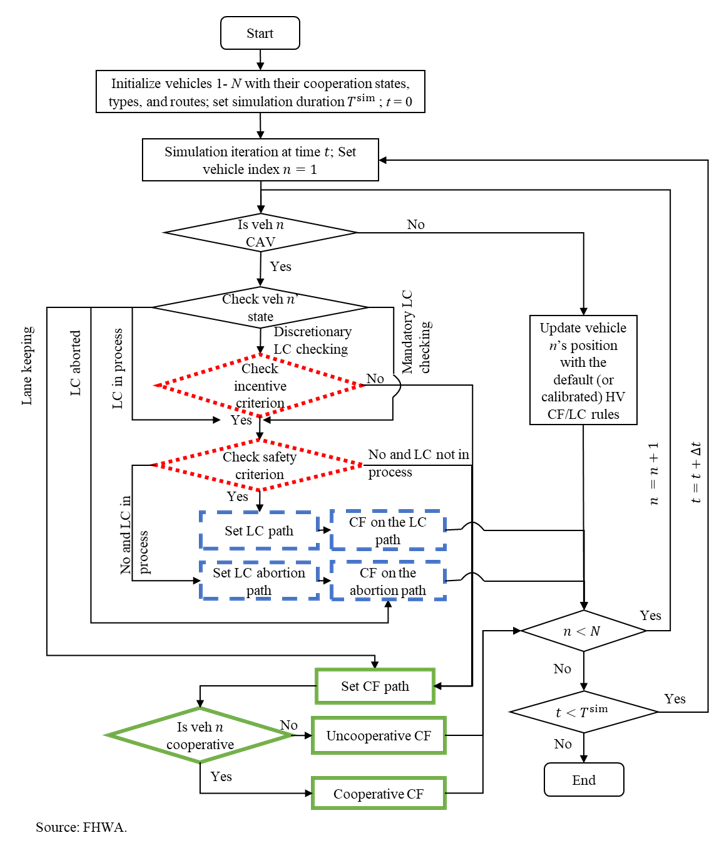
Simulation of Mixed Traffic with Cooperative Lane Changes: Our research team proposed a mixed traffic simulation framework that integrates vehicle car-following (CF) and lane-changing (LC) movements in mixed traffic with CAVs of different cooperation behaviors. This framework is centered at a CAV LC model integrated with CF dynamics in mixed traffic. The model includes three key components: a CF component, an LC decision-making component, and an LC/LC abortion path generation and following component. The proposed CAV LC model was calibrated and validated by field data collected during a previous study (Wang et al., 2020). The model’s results well replicated the field observations. To demonstrate the applicability of the proposed model, the team implemented a case study of a segment of the I–75 freeway in the Tampa Bay area on the Vissim microsimulation platform. The case study drew a set of managerial insights into how different parameter settings impact the traffic performance including mobility and traffic stability, accounting for uncertain and varying technologies in the process of following CAV deployment.
Related Projects and Funding Agencies