Modular Connected and Automated Vehicle
Vision and Background
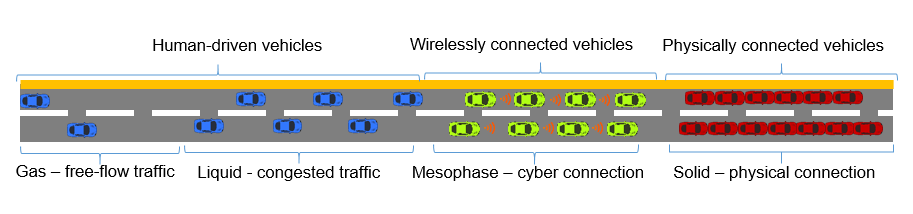
Emerging technologies in communications and vehicle technologies will allow future automated vehicles to be platooned together with wireless communications or physically forming modular automated vehicles as shown in the figure below.
• Human-driven vehicles (the blue vehicles in the above figure): Classical gas-liquid-phase-based dynamics.
• Wirelessly connected vehicles (the green vehicles in the above figure): Mesophase-based dynamics, automated and connected vehicles (CAVs).
• Physically connected vehicles (the red vehicles in the above figure): Solid-phase-based dynamics, modular and automated vehicles (MAVs). (The industry prototypes of MAVs can be found in
"http://www.next-future-mobility.com/" and in
"https://robotik.dfki-bremen.de" )
Objective
This research investigates fundamental scientific questions in macroscopic level fleet management and microscopic level vehicle operations of MAV transportation systems.
The objectives of the macroscopic level research are:
• Make transportation infrastructure capacity “elastic” to bridge the gap between time-varying and spatially-continuous travel demand and timely-invariant and spatially-aggregated transportation road infrastructure.
• Propose a new “transmodal” MAV-based transportation fleet operation paradigm to investigate fundamental structures and theoretical properties of network fleet management.
• Conduct large scale simulation to evaluate the costs and benefits of a MAV system in a major US city.
The objectives of the microscopic level research are:
• Gain new knowledge on the impacts of the emerging new states in highway traffic dynamics in both ideal and realistic operational conditions.
• Devise mechanisms and managing strategies to properly regulate the multi-state mixed traffic for its best performance.
• Quantify the key components of the models and systems via both full-scale and reduced-scale testbeds.
Progress to Date
At the macroscopic level, we focus on fleet operation models for MAVs in various mobility settings. Different form conventional mass transportation systems, operational decisions in MAV systems must include vehicle capacity. This change greatly increases the solution space of the fleet operation models. We approach this challenge via the combination of theoretical analysis, numerical algorithms, and analytical approximation.
• We identify theoretical properties of optimal system structure, e.g., passenger queuing behavior, bounds to vehicle capacity.
• We develop numerical algorithms to solve exact optimal design, e.g., dynamic programming algorithm, branch and bound algorithm.
• We apply the classic continuum approximation framework to decompose the problem into analytically solvable subproblems.
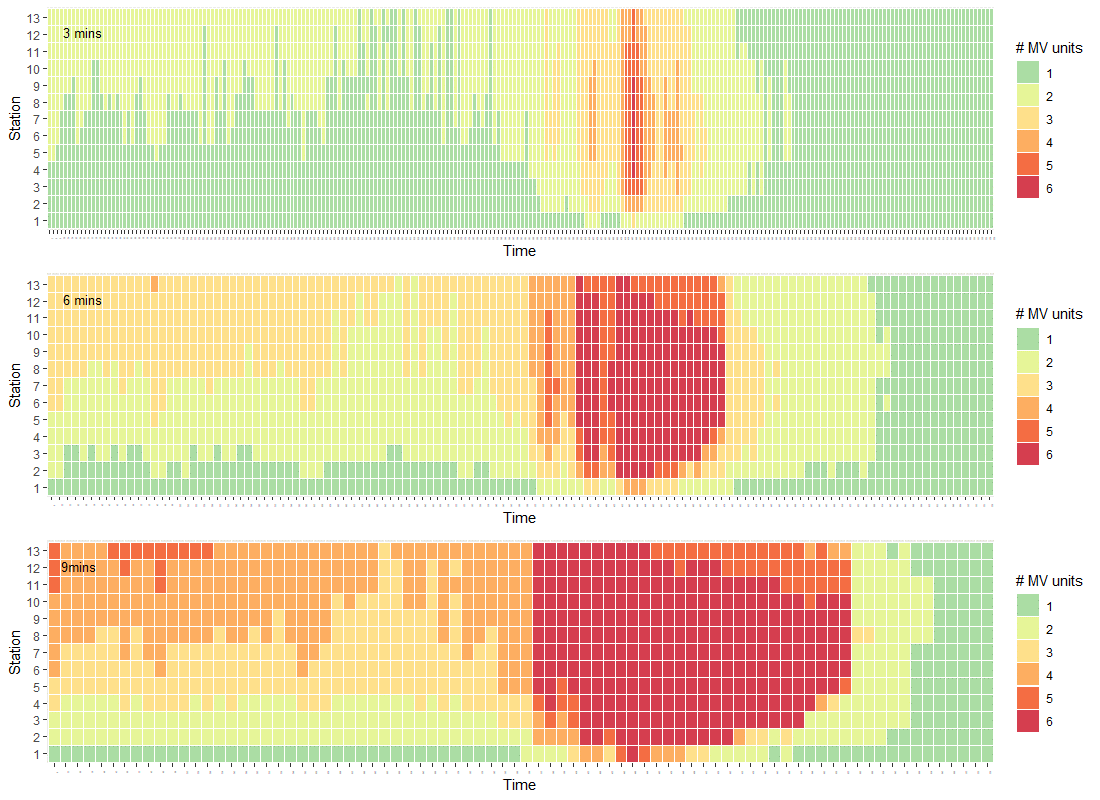
• We conduct extensive case studies to test the quality of service and energy implications of the MAV transportation systems, with realistic traffic demand data from the Beijing Subway System, the Tampa International Airport, and the Tampa Bay Activity-Based Model. The figure below shows examples of the optimal results for Batong Line in Beijing Subway System.
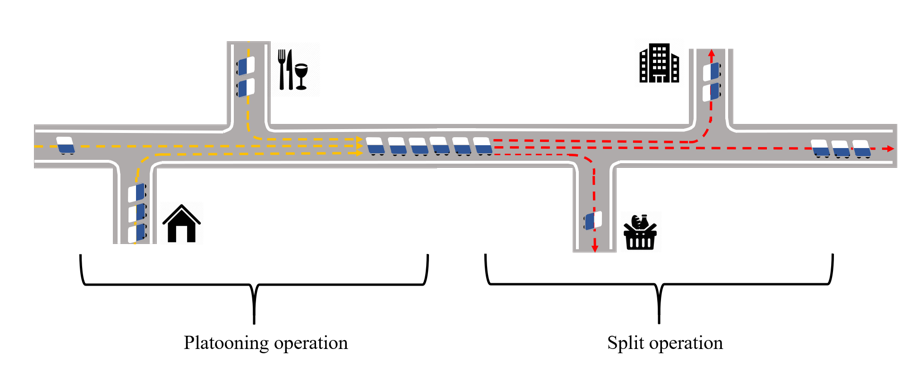
At the microscopic level, design and implementation of physically connected techniques (e.g., docking and split operations) for MAVs is the first building block for the project. We have proposed algorithms for MAV docking and spliting operations, as illustrated in the figure below.
• MAV docking operation clusters shorter MAV platoons into a longer MAV platoon by decreasing car-following gaps to zero.
• MAV split operation separates a longer MAV platoon into several shorter MAV platoons.
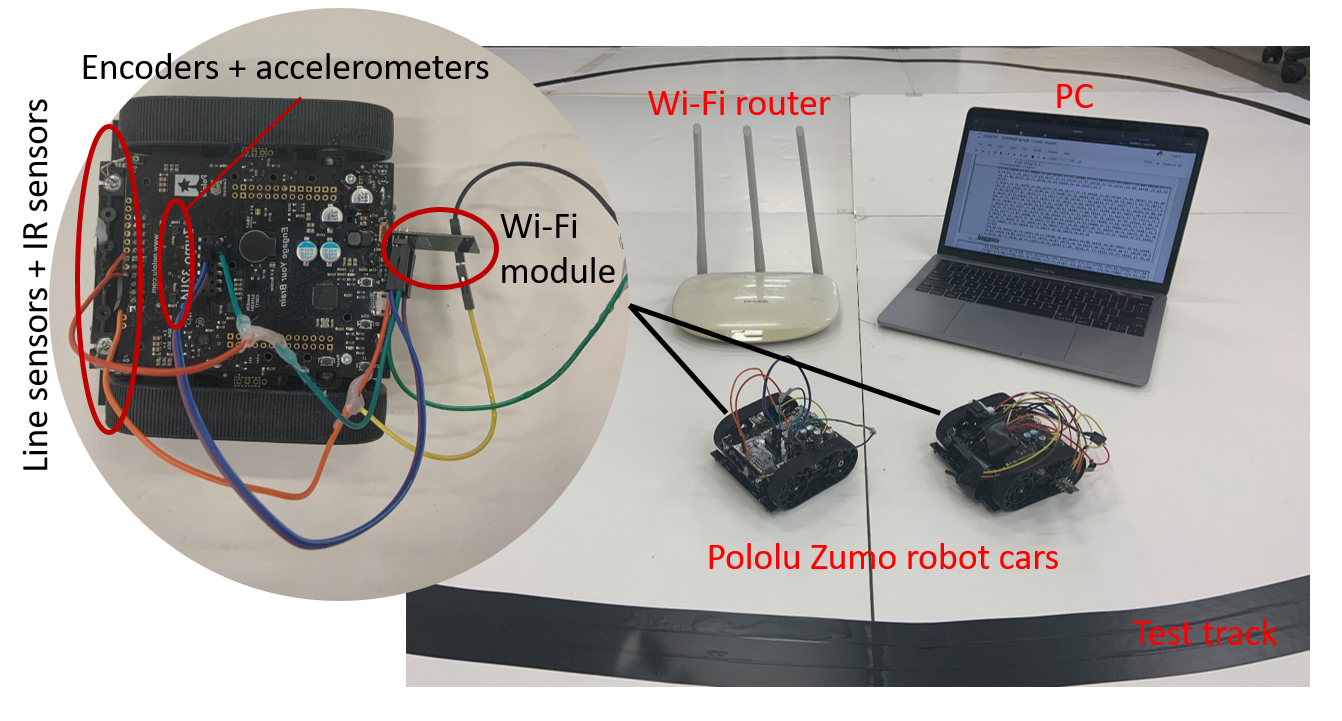
Besides, we have upgraded the reduced-scale testbed to evaluate the performance of the MAV operations considering realistic cyber-physical constraints. The figure below shows the overview of the reduced-scale testbed.
• A PC is used to plan the optimal speed trajectories for robot cars and to visualize actual trajectories.
• A Wi-Fi router is used to send the planned speed trajectories to the robot cars per 0.4 s.
• Pololu Zumo robot cars with the Arduino operation system, various sensors (e.g., line sensors, IR sensors, encoders, and accelerometers) and communication modules (e.g., wifi) are adopted to implement the planned speed trajectories and to record the actual trajectories.
Related Projects
References from Our Work
*Li, Q. & Li, X. Trajectory planning for autonomous modular vehicle docking operations. Transportation Science, under revision.
[https://www.researchgate.net/publication/342692770_Trajectory_planning_for_autonomous_modular_vehicle_docking_operations]
*Shi, X. Chen, Z., Li, X. & Qu, X. Modular autonomous vehicle operations for airport baggage transportation. submitted.
[https://www.researchgate.net/publication/344934235_Modular_Autonomous_Vehicle_Operations_for_Airport_Baggage_Transportation]
*Shi, X. & Li, X. Operations Design of Modular Vehicles on an Oversaturated Corridor with First-in-first-out Passenger Queueing. Transportation Science, under revision.
[https://www.researchgate.net/publication/342672916_Operations_Design_of_Modular_Vehicles_on_an_Oversaturated_Corridor_with_First-in-first-out_Passenger_Queueing]
*Chen, Z. & Li, X. A continuous model for designing corridor systems with modular autonomous vehicles enabling station-wise docking. Transportation Science, under revision.
[https://www.researchgate.net/publication/337233536_A_continuous_model_for_designing_corridor_systems_with_
modular_autonomous_vehicles_enabling_station-wise_docking]
*Chen, Z. & Li, X. Designing corridor systems with modular autonomous vehicles enabling station-wise docking: Discrete modeling method. Tentatively accepted for the 24 International Symposium on Transportation and Traffic Theory (ISTTT24) and Transportation Research Part E.
[https://www.researchgate.net/publication/342733699_Designing_corridor_systems_with_modular_autonomous_vehicles_enabling_station-wise_docking_Discrete_modeling_method]
*Pei, M., Lin, P., Du, J., Li, X. & Chen, Z.(2021) Vehicle dispatching in modular transit networks: A nonlinear mixed-integer programming model. Transportation Research Part E, 132, 76-100.
[https://doi.org/10.1016/j.tre.2021.102240]
*Shi, X., Chen, Z., Pei, M., & Li, X.(2020) Variable-capacity operations with modular transits for shared-use corridors. Transportation Research Record, 0361198120928077.
[https://doi.org/10.1177/0361198120928077]
*Chen., Z., Li, X. & Zhou, X. (2020) Operational design for shuttle systems with modular vehicles under oversaturated traffic: Continuous modeling method. Transportation Research Part B (jointly presented at the 23 International Symposium on Transportation and Traffic Theory, ISTTT23), 132, 76-100.
[https://doi.org/10.1016/j.trb.2019.05.018]
*Chen., Z., Li, X. & Zhou, X. (2019) Operational design for shuttle systems with modular vehicles under oversaturated traffic: Discrete modeling method. Transportation Research Part B, 122, 1-19.
[https://doi.org/10.1016/j.trb.2019.01.015]