At the beginning of 2019, the USF CATS lab started to work on Connected and automated vehicle related research. It is worth to mention that our team is the first team that performed public connected and automated vehicle demonstration across the nation. We have gained nationwide attention and have applied bunch of project.
We preformed the first public AV demonstration of USDOT CARMA 3.0 platform at 2019 FAV Summit.
We designed and conducted a set of field experiments to reveal differences in car-following behaviors between a human driver following-AV and following-HV on both constant speed traffic characteristics with discrete speeds ({10,20,…,60}km/h) and dynamic car-following behaviors with continuous speeds (within 0-60 km/h).
We present an optimal vehicle speed trajectory generation methodology on an isolated signalized intersection under the mixed traffic environment. The proposed model contains platoon management, arrival time prediction, speed trajectory generation, and vehicle control. The proposed model considers fuel consumption and driving comfort.
In this scenario, the preceding vehicle on the current lane decreases its speed during the driving, representing the current lane experiencing a slowdown wave. The preceding vehicle on the target lane maintains a relatively constant speed. The following vehicle on the target lane is cooperative to AV lane changing.
In this scenario, the preceding vehicle on the target lane is asked to decrease suddenly, representing the target lane experiencing a slowdown wave. The preceding vehicle on the current lane maintains a relatively constant speed. The following vehicle on the target lane is cooperative to AV lane changing.
In this scenario, the preceding vehicles on both lanes maintain a relatively constant speed, representing relatively steady traffic states. The following vehicle on the target lane is however uncooperative to AV lane-changing maneuver. This run is to test the fail-safe abortion mechanism of the proposed lane-changing model.
2020 review
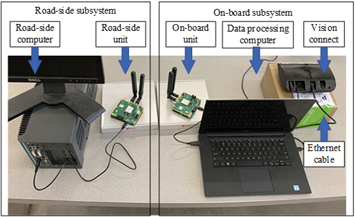
During 2020 the CATS lab has performed several CAV related research and field experiment. Take advantage of the two L3 test beds, we further investigated the interaction between Human-driven Vehicle (HV) and Connected and Automate Vehicle (CAV), including the car following behavior in the mixed traffic, trade off between headway setting and safety. Our group also developed a self-designed V2I communication and tested it dynamically in the field.
Utilizing the L3 test bed, we performed serial of mixed traffic field experiment,these field experiment gives us high-definition trajectory data to preform research on safety, mobility, stability, and energy issues.
We tested the self-developed V2X communication equipment at lab condition.
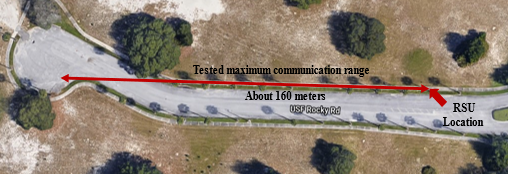
We also tested the communication delay of the self-developed V2X communication out of the lab, when the vehicle approaches in different speed.
Vehicle Approaching Speed (mph)
Package Transfer Delay (ms)
0
56
10
63
20
108
2021 Review
We put a lot of time in tuning our vehicle control algorithm in 2021. The embedded lateral and longitudinal control in Autoware is not capable of controlling the vehicle in complicated traffic condition. Beside the control algorithm, there are several projects in progress.
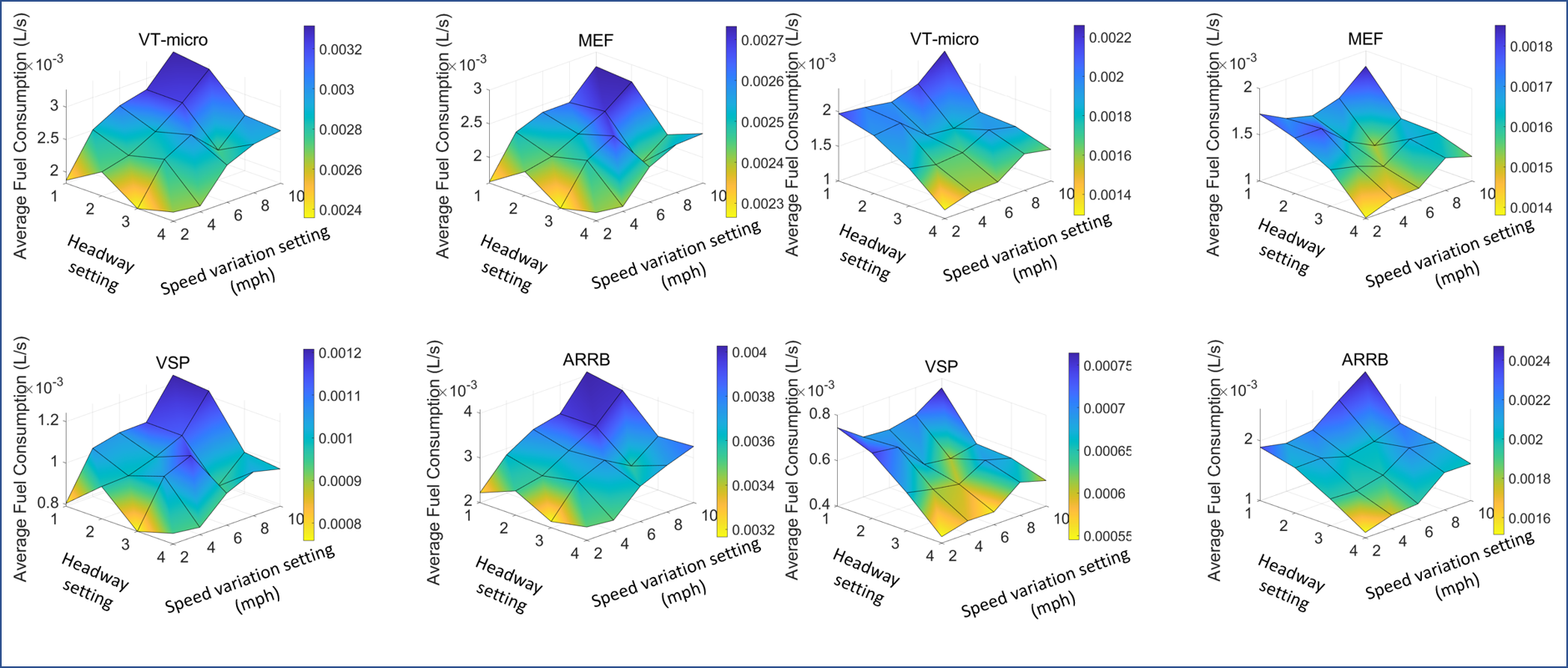
To investigate the impacts of Adaptive Cruise Control function in commercial automated vehicle on fuel consumption. The CATS lab has collected high resolution trajectory data of commercial AVs with different operation scenarios. Fuel consumption is calculated by several state-of-the-art or classical vehicle fuel consumption models.
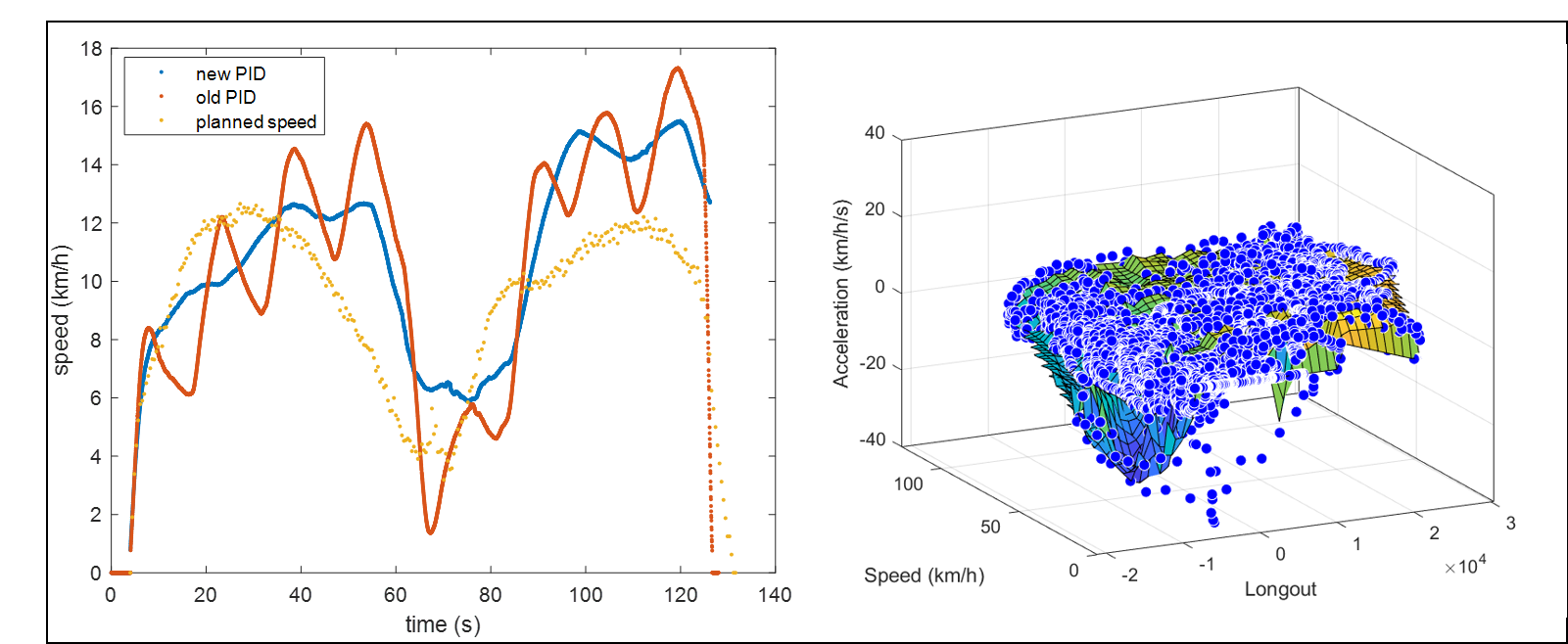
The CATS lab developed a piecewise-PID control algorithm for vehicle lateral and longitudinal control.
A recent project with Connected Wise would demonstrate a state-of-the-art Smart Traffic Sign, and V2X communication.
• Susan A. Bracken Faculty Fellowship, University of South Florida
References from Our Work
• Zhao, X., Wang, Z., Xu, Z., Wang, Y., Li, X., & Qu, X. (2020). Field experiments on longitudinal characteristics of human driver behavior following an autonomous vehicle. Transportation research part C: emerging technologies, 114, 205-224.
[https://doi.org/10.1016/j.trc.2020.02.018]
• Wang, Z., Zhao, X., Xu, Z., Li, X., & Qu, X. (2019). Modeling and field experiments on lane changing of an autonomous vehicle in mixed traffic. Computer-aided Civil and Infrastructure Engineering.
[http://dx.doi.org/10.13140/RG.2.2.19857.58724]